πKerBu
eBioROBOT series
Excerpt from the registered project in 2017©
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 2
Introducon ............................................................................................... 3
Before introducing us into the project
πKerBu
, some data will enlighten
the enty of the problem. ......................................................................... 4
The Projet
πKerBu
............................................................................... 8
For the lile story ...................................................................................... 9
Annexe ...................................................................................................... 20

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 3
We contact your Association or Organization to present a project in the
process of development that should attract your interest.
This project represents, in our modest opinion, a contribution to the construction
of the ecological sustainability, thus to the safeguarding of our ecosystem.
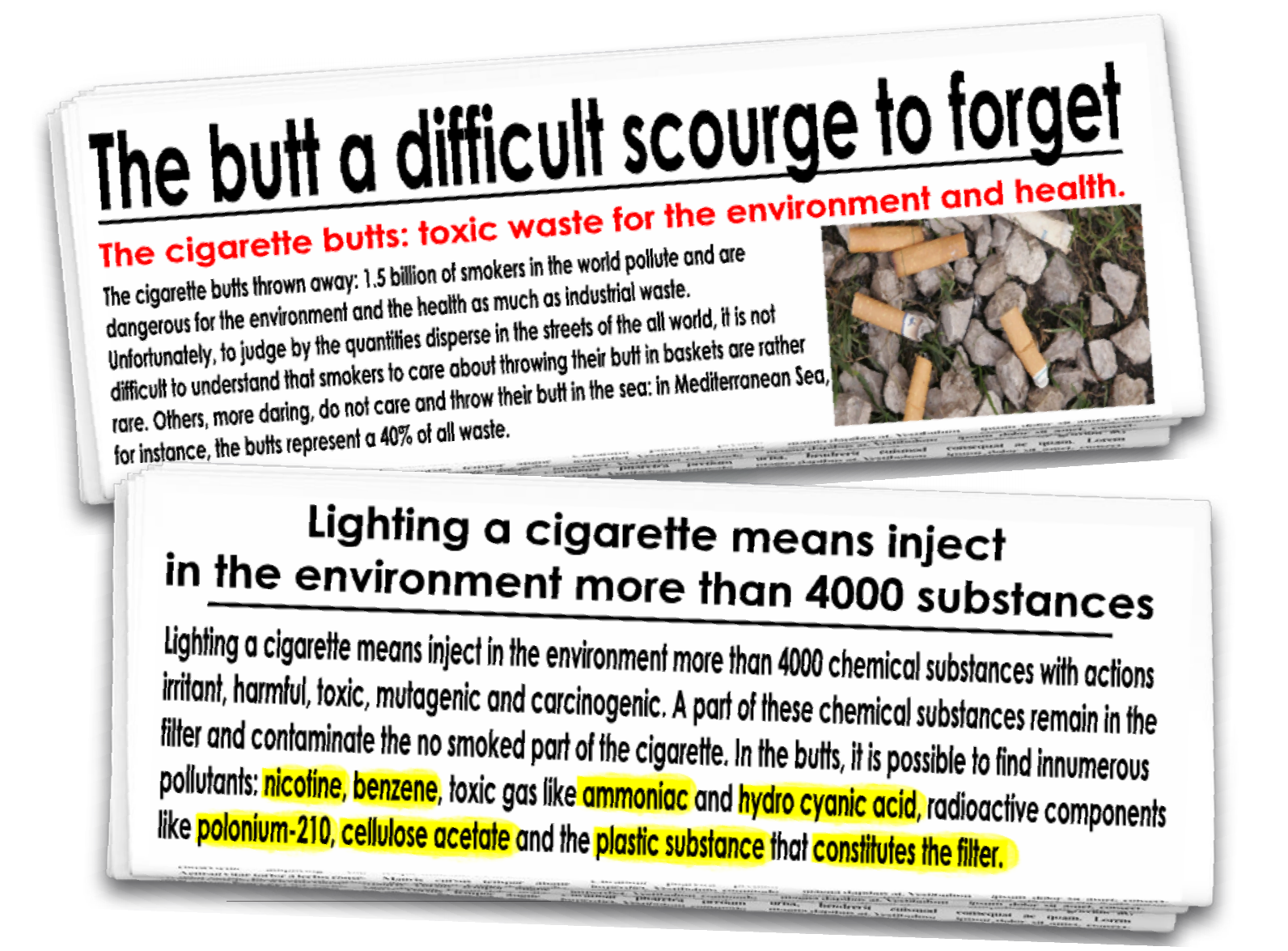
Our aim is not to expound on one of the most important causes of pollution; but
it nevertheless seems important to us to draw the attention the abandonment
of cigarette butts and other objects in the environment.
To understand the complexity of this scattering problem and to quantify
the scourge entity, we have harvested some articles that will make state
and inform about this phenomenon, if necessary.
In fact we cannot imagine a more adequate expression that designs the
biggest scourges are provoked from small cases.
Even if numbers are not always in harmony, we can establish certainly
that this scourge is catastrophic, in the light of estimated and preventive
data, real politics, guaranteeing the control of the phenomenon, and the
actions of bonus will inevitably be necessary.

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 4
Before introducing us in
the project
πKerBu
,
certain data shall lighten
the enty of problem.
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 5

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 6

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 7
If doubts persist, the tables
of the annexe can untie them.

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 8
The Project
πKerBu

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 9
For the lile story ...
The soluons so far adopted have not eradicated the scourge. Without a doubt the system
more eecve would be that of educaon or prevenon or the simple and eecve eliminaon
of smoking.
One day, in the public garden “Square du Jardin du Roi” in Brussels, while I was watching
a municipal operator, I was aracted by the use of a manual forceps that allowed him to
harvest, one by one, the bus scaered on the ground. Obviously the bus were scaered
on all sides and some camouaged and almost invisible. Looking at aenvely, I had noced
that they were thousands and a lot of them now mimezed and covered. The operator aer
having gathered the most conspicuous on his way went away to connue his daily journey. A
drop taken from the ocean perishes unnecessarily. If it stays in the ocean, it shares the glory
to support a eet of powerful ships. An inapplicable work that requires an inhuman work rate,
a maniacal aenon and especially an order and a method unacceptable to reach creditable
eciency.
Sll seang on the bench, looking the ground, I realized the magnitude of the problem. With
the Cartesian engineer’s mind that I always try to apply to all the quesons that life poses me,
I was starng building in my mind a prototype that could help to collect these foreign objects.
In a few months me, I developed a real project that can solve the problem of the collecon
in taking into account human and objecve dicules.
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 10
Descripon of Project
πKerBu
:
The system, for an automated harvest of cigaree bus and any other objects, poses essenal
dicules that can be summarized in the following points:
• Idencaon of the objects to be harvested (bus, cigarees lit, syringes, needles, coon
bud, cans etc.)
• Strolling in natural and urban environments on rugged ground, where access is penalized,
by innumerable architectural barriers (parks, gardens, roads, sidewalks etc.)
• Energec autonomy.
• AI Arcial intelligence that can combine inially introduced informaons, on one side,
and those acquired empirically during the phase of acvies.
• Transmission of informaons, collected in dierent forms, to a data base.
Remote external intervenon to allow a manual harvest.
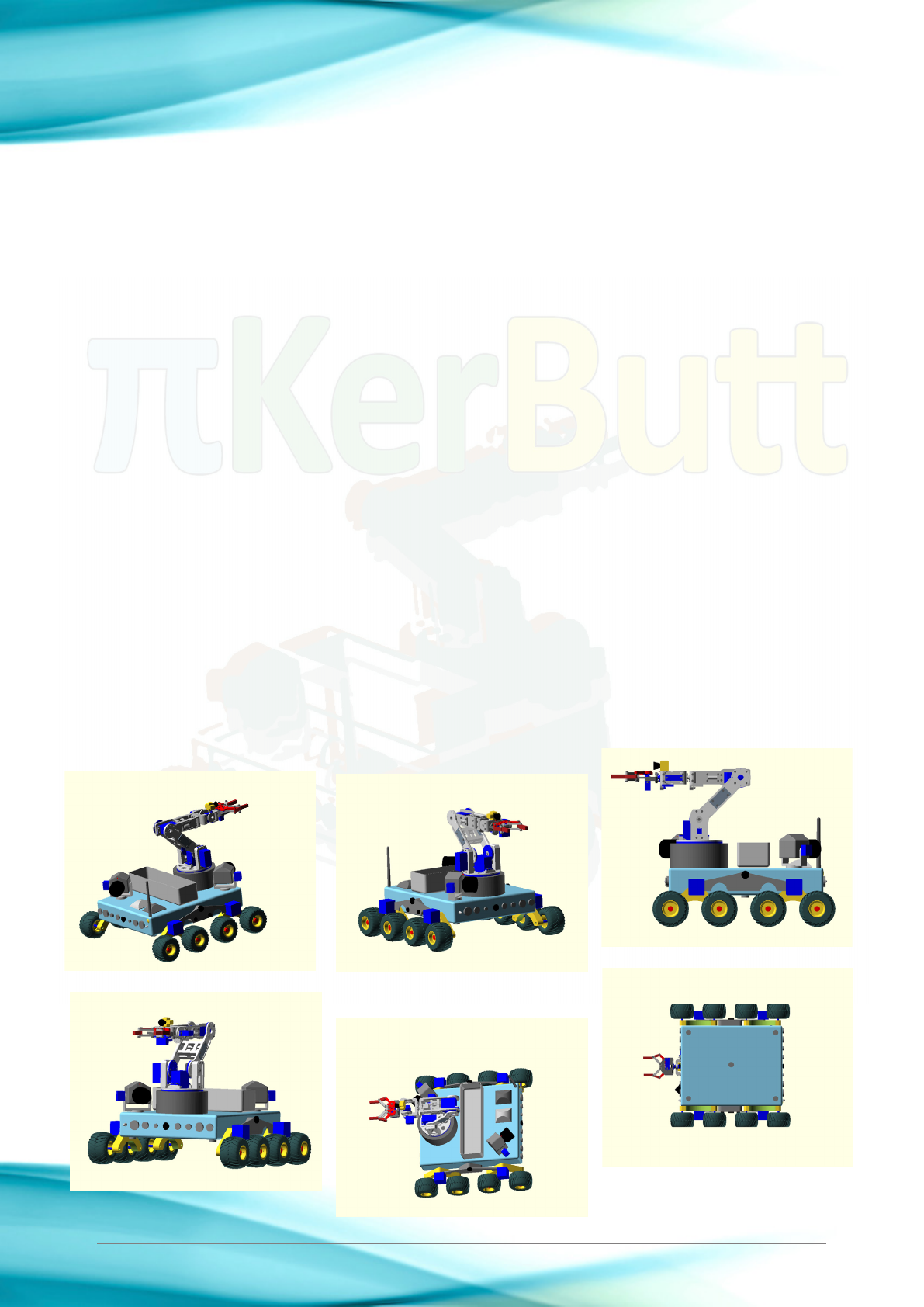
The necessies and the objecves prexed for the creaon of a robot capable of carrying out
these various tasks lead us to realize a system of several automatons working in synergy.
The Robot is divided in 4 main automatons, which bustle by acons coordinated in the
fulllment of the harvest of cigaree bus. This also means, have a communicaon between
the various elements with a hierarchy priority, exible and modiable according to the
condions met during the acvity of harvest.
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 11
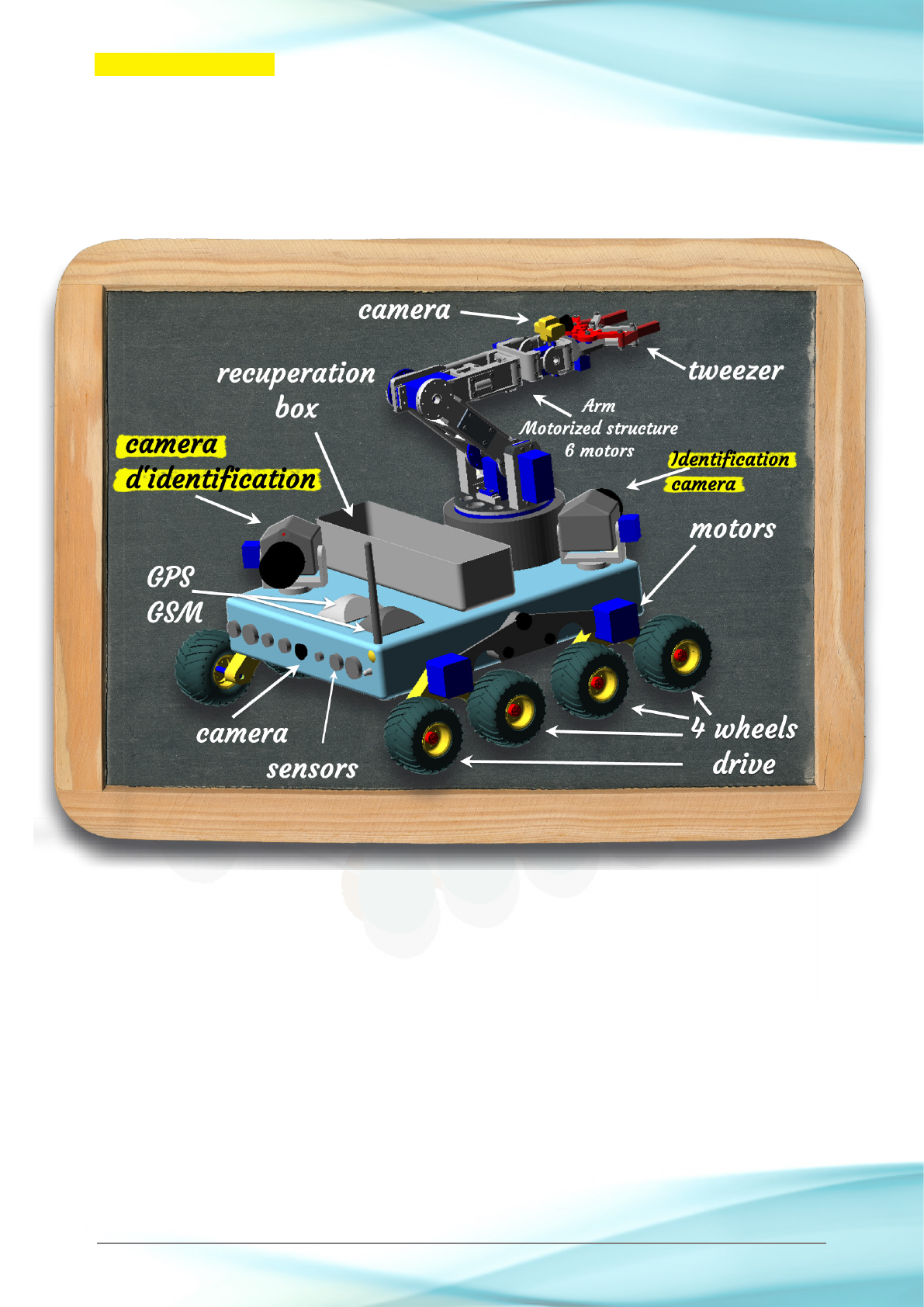
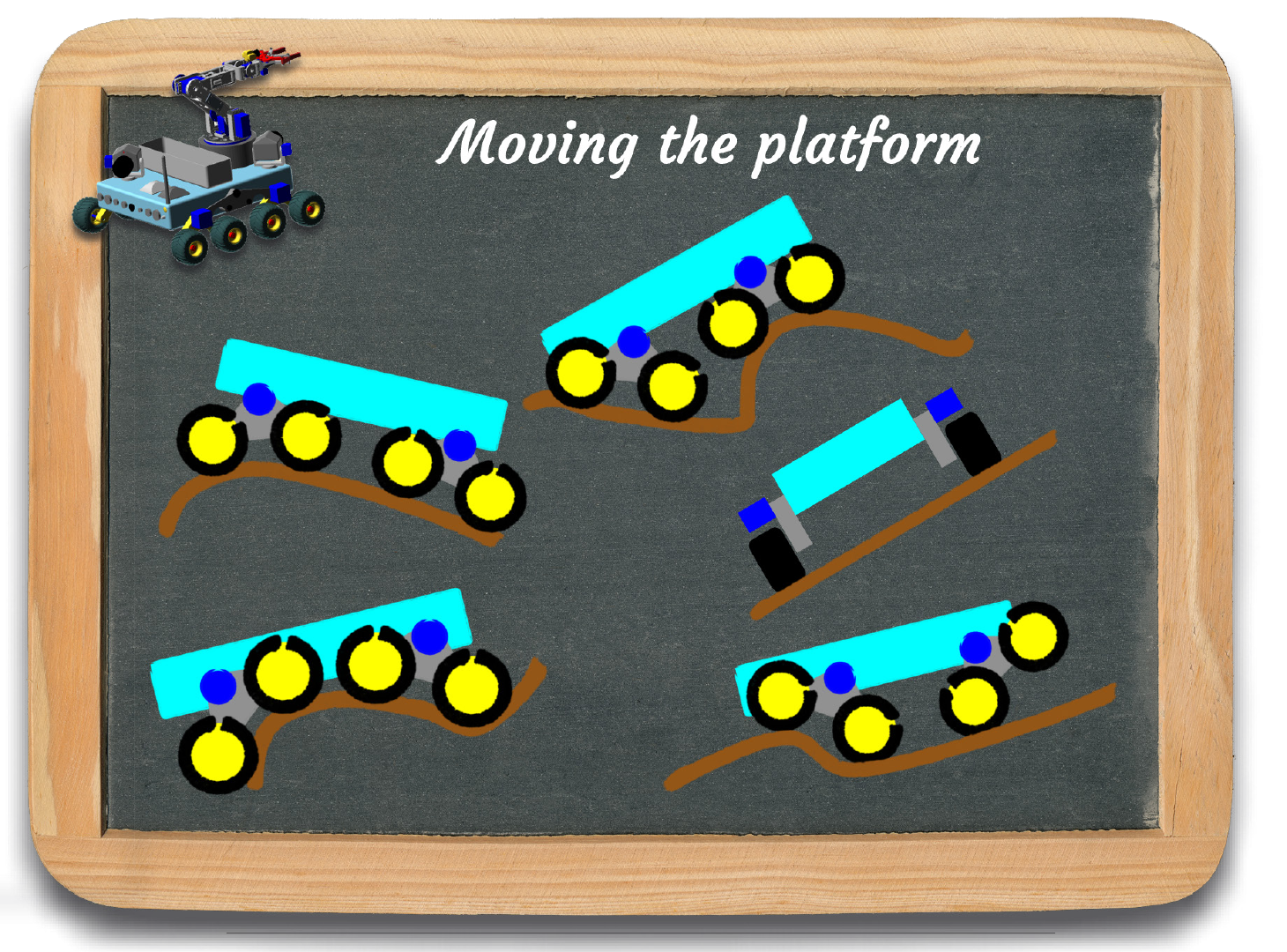
The plaorm of transfer is constuted by 8 rubber driving wheels with high adhesion with
special joins, which allow them to cross-important architectural barriers with strangely
considerable dierences of height. The device consists of 4 coupled independent motors each
two-wheeled (both wheels are driving). The control of the plaorm is precise and allows very
short movements for a millimeter-length posioning.
The power is also important because all other parts are seled on this plaorm.
A made up of baeries drum kits and equipments is transported in complete safety since this
universal plaorm.
It requires of a low couple to move in the ruling and oers a big handiness.

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 12
Equipped with various sensors of proximity and cameras necessary for the displacement,
which are installed inside the plaorm.
The sensors can be used to record useful informaons for autonomous navigaon also record
informaons of dierent nature transmied to the remote unit (environment condions
data). A GPS with a series of gyroscopes and accelerometers allows to idenfy the posion
of the plaorm and to transmit it to the unit of remote control but also to guarantee an
autonomous movement.
The video transmissions and data are made through diverse technologies, WIFI, GPRS, Blue
tooth and others.
The internal compartment of the plaorm contains various electronic units and accommodates
baeries necessary to supply the sucient energy for the driving acvies of the plaorm,
the arm and the cameras of idencaon.
The various cameras, accommodated inside the plaorm, have two main funcons: to relieve
the ground and the possible mobile and stac obstacles report these data to the remote unity.
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 13

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 14
The Arm consists of a simple motorized structure with 6 motors capable of giving a maximal
exibility. Arculated on 6 axes, it is equipped with a crowbar with mobile jaw capable of
liing middleweight.
The base, on which the arm rests and which allows its rotaon around its own axis, is xed to
the front of the plaorm and is accommodated inside the compartment of this one.
The xaon inside the plaorm allows creang a unique and stable structure.
The plaorm and the arm constute a unique structure by giving stability and a solidity to the
robot in spite of its small dimensions.
The shoulder of the robocs arm allows to raise and to lower the pliers as well as its extension.
The forearm allows making the same operaons of the arm and the shoulder.
The associaon movements achieved by these dierent elements ensures, on one hand, a
distribuon of eorts and an increase in the force applied and on the other hand greater
freedom of movements. The pliers can open and close, turn on its axis or li up itself and fall
by feigning the movements of the wrist.
The pliers was conceived so as to be able to collect objects of various types and, if need be,
to equip itself with a removable and independent tools be used according to the met needs.
A small electronic card commands everything with a microcontroller and dierent peripheral
circuits.
Descripon of operaons
The robot is acvated by 6 servo-motors with direct current which allow to move the
various elements. It possesses 5 degrees of freedom as well as the movements of

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 15
opening and closure of the pliers. The rst degree of freedom allows the movement
of rotaon around the vercal axis, the second and the third the movement of both
arculated arms, the fourth the movement of the pliers and the h the rotaon of
the pliers around its own axis. With this device, it will be possible to use the same
robots for numerous various applicaons according to the established programming.
The servo-motors of the robot are two types:
• 3 motors of modest power are used for the rotaon and for the opening / closure of the
pliers.
• 3 motors of superior dimensions size and power, which allow the arm, through simple
gearings, to manipulate loads of the order of approximately 2 to 3kg.
A small electronic board with a microcontroller and dierent peripheral commands
everything. The arm is equipped with a camera of modest dimension with sensors of dierent
types capable of establishing the distances, the morphology of the space surrounding, the
object to be collected, its dimensions, its posion, its color and other informaons. This
camera installed on the arm follows all the movements of the laer. All informaons can, if
it is necessary, be forwarded to the unity of remote surveillance. The robot with its mobile
plaorm is interacve, and thus, capable of nding the presence and the distance of objects
in a determined ray and of making the seizure and the posioning.
The idencaon cameras. The units described unl now are necessary for the prexed
purpose but do not represent the heart and the motor of the project. Without the unit
that we are ready to describe, it would not be possible to joint the prexed objecve. The
idencaon unit or even recognion is the keystone of the enre system.

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 16

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 17
This unit is composed by two cameras, with parcular opcal characteriscs, and a few
sensors that help the idencaon and the determinaon of data necessaries to the arm for
the harvest of the object. These two cameras, equipped with a parcular complex opc and
the AI (arcial intelligence) support, consent idencaon of an object through the dierent
dimensions, colors and morphology. The diculty that shows itself is not represented by
the idencaon of an object but by its dissimulaon. This implies an adequate AI that can
plan the characteriscs of the object to look for. Plan is a synthesis of informaons basic and
acquired by the experience, elaborated by an algorithm able to ancipate the lines of the
future object, even if never discerned previously. Both cameras are xed to mobile bases that
allow one degree of freedom on two axes. These assisted by various technologies sweep in a
connuous way the ground in search of objects.
It is necessary to underline the acon of the AI that manages to develop quickly and punctually
all the informaons to idenfy the object. As explained previously the share of idencaon
is supported by the faculty power of apprenceship.
The immediate use of the recorded data, without the necessity of waing for an elaboraon in
posteriori with the remote server, returns the successful and eecve AI during its collecon.
The same elaborate informaons can be added on other units as basic know-how, so by
compleng the experience of diverse robots and by making them more skillful. This funcon
has been dened with the word “ smartrisaon “. The smartrisaon can be transmied to
other units to increase their eciency.
The study and the analysis of the AI were in the center of our searches and, further to
uncountable experiments, we succeeded in developing soware able to recognize small
objects as the cigaree bus.
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 18
Obviously the evoluon does not stop and thus the objecve is to be able to create a eet of
robots capable of interacng between them and of improving determined zones eecvely
and methodically.
The possibilies and the prots oered by these acons on large scale are, undoubtedly,
a valid and eecve answer to an uncontrolled scourge among which the impact and the
repercussions are not sll well esmated as demonstrate the gures of the researchers.
Besides, you should not forget that the same plaorm of the robot is able of realizing
simultaneously other operaons of detecon, as for example a collecon of accurate and
precise environmental informaon.
This robot demonstrates, more that others, the real nature and the necessity of this type of
device.
ORDER, METHOD AND CONSTANCY = EFFICIENCY

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 19

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 20
Annexe
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 21

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 22
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 23
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 24
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 25
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 26
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 27
Experiments were made with bus, with about 1 to 2 cm of tobacco le, then bus without tobacco
remaining and nally, unused lters. They were soaked separately in a diluon of water (mineral water
diluted for freshwater sh and seawater for sea sh) for 24 hours. Then, diluons were made and the shes
were allowed to live or survive for 96 hours.
The study looked for the bu’s concentraon that provides 50% sh mortality, which is called LC50 (lethal
concentraon 50).
The results showed that the LC50 for cigaree ends containing some tobacco was reached 1,1 cigaree
bus/Liter for the two sorts of shes.
The LC50 for the alone cigaree ends was reached 4,1 cigaree ends/Liter for the sh of seawater and 5,5
cigaree ends/Liter for the freshwater sh.
The LC50 for the clean lters was reached 5,1 cigaree ends/Liter for the sh of seawater and 13,5 cigaree
ends/Liter the freshwater sh. What is surprising the lter out only turns out nally rather toxic.
There are quite obvious dierences for bus only between marine and freshwater species.
The seawater sh (Atherinops anis) is much more sensive to the toxicity of bus.
According to the study, this could be due to the hardness of the seawater. It is then possible that any nicone
not available becomes bio-available more quickly in seawater, thus delivering faster stronger concentraon
to sh.
On the other hand, regarding bus alone, it is possible that smoking creates new products more toxic

chemicals and changes the solubility of the compounds in the bu making them more bio-available.
Despite the growing evidence of bu toxicity that has now been made on two species of sh, it remains
dicult to assess the actual impact of bus on the aquac environment (ie on a wider scale). Therefore,
further research is needed on the compounds that come into play, the potenal for bioaccumulaon
corresponding to the ability of organisms to absorb and concentrate certain chemical substances.
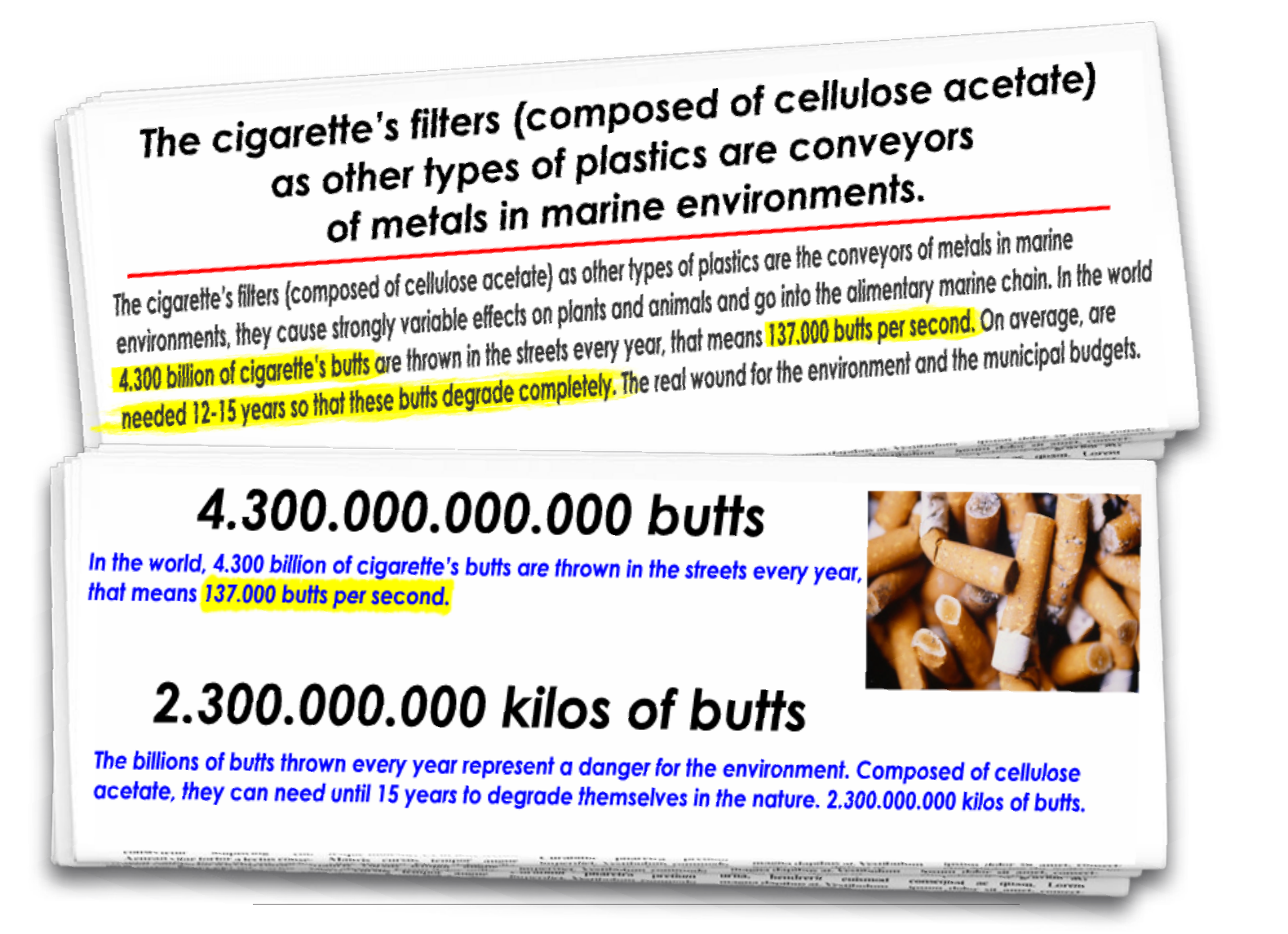
As other gestures of our everyday life, which damage the environment, to throw his cigaree end to the
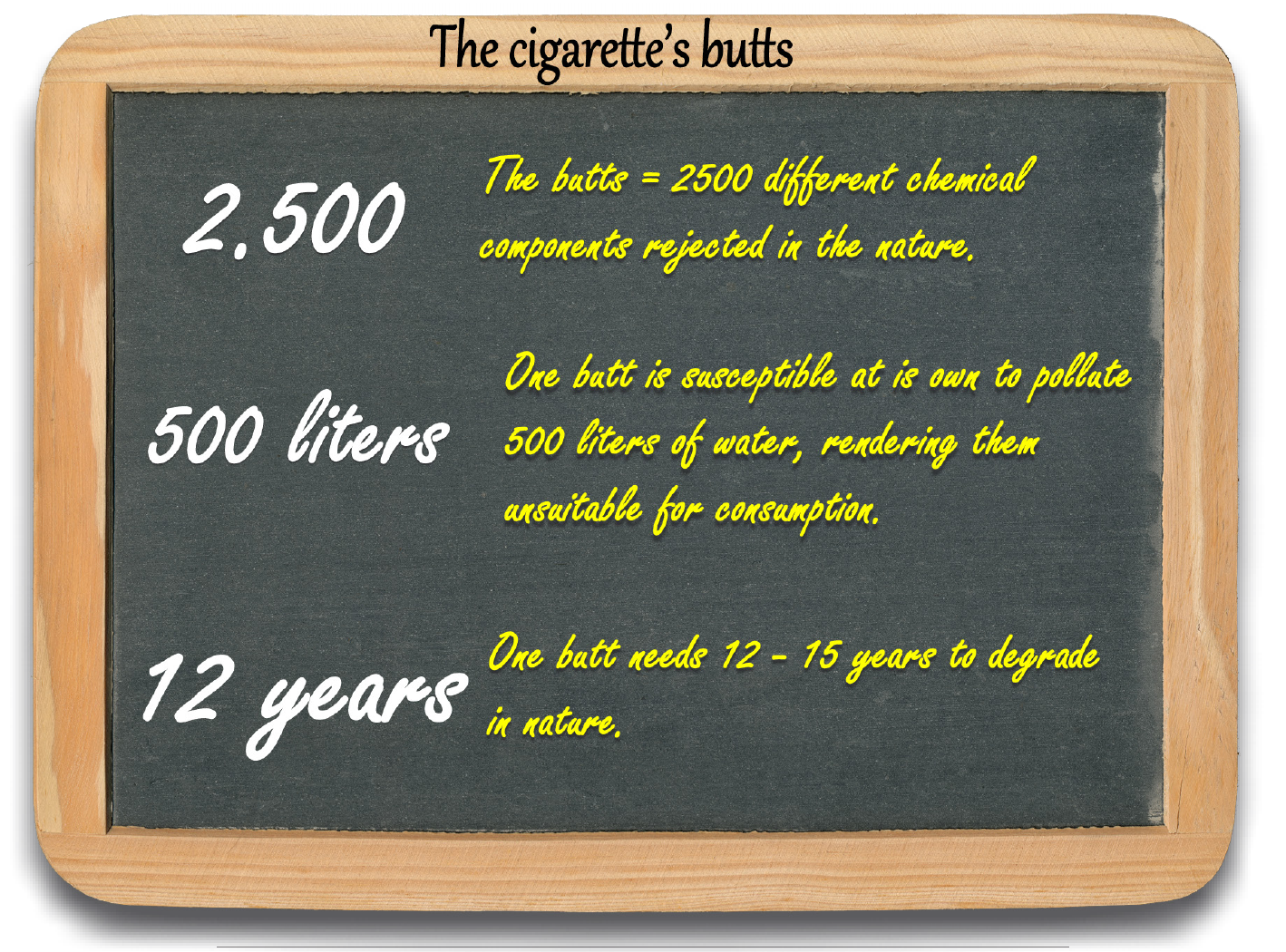
ground has consequences more important than what we imagine. The cigaree end is indeed the rst
marine waste. Taken by the wind and the rain, it quickly nds itself in sewer systems then in aquac
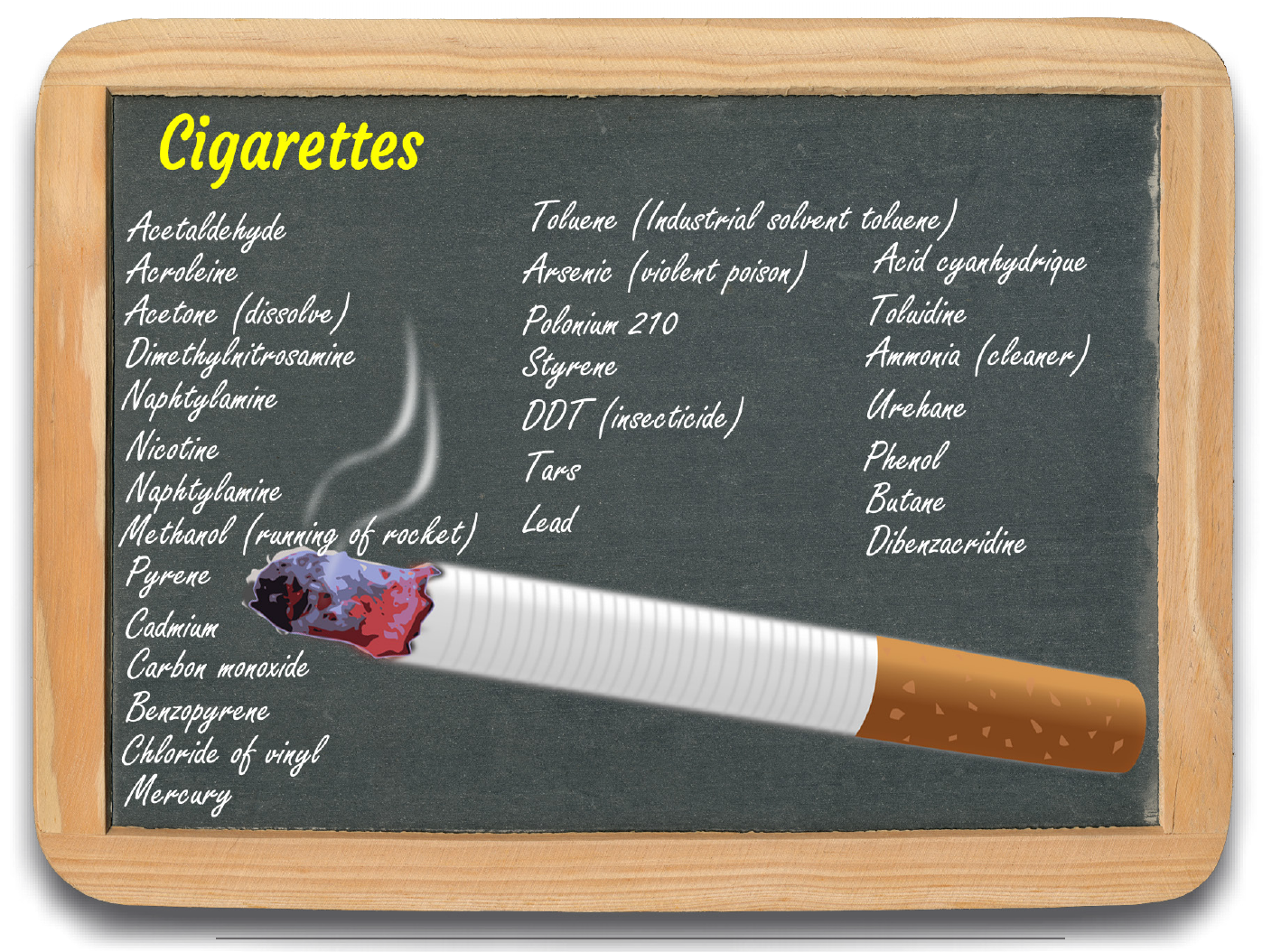
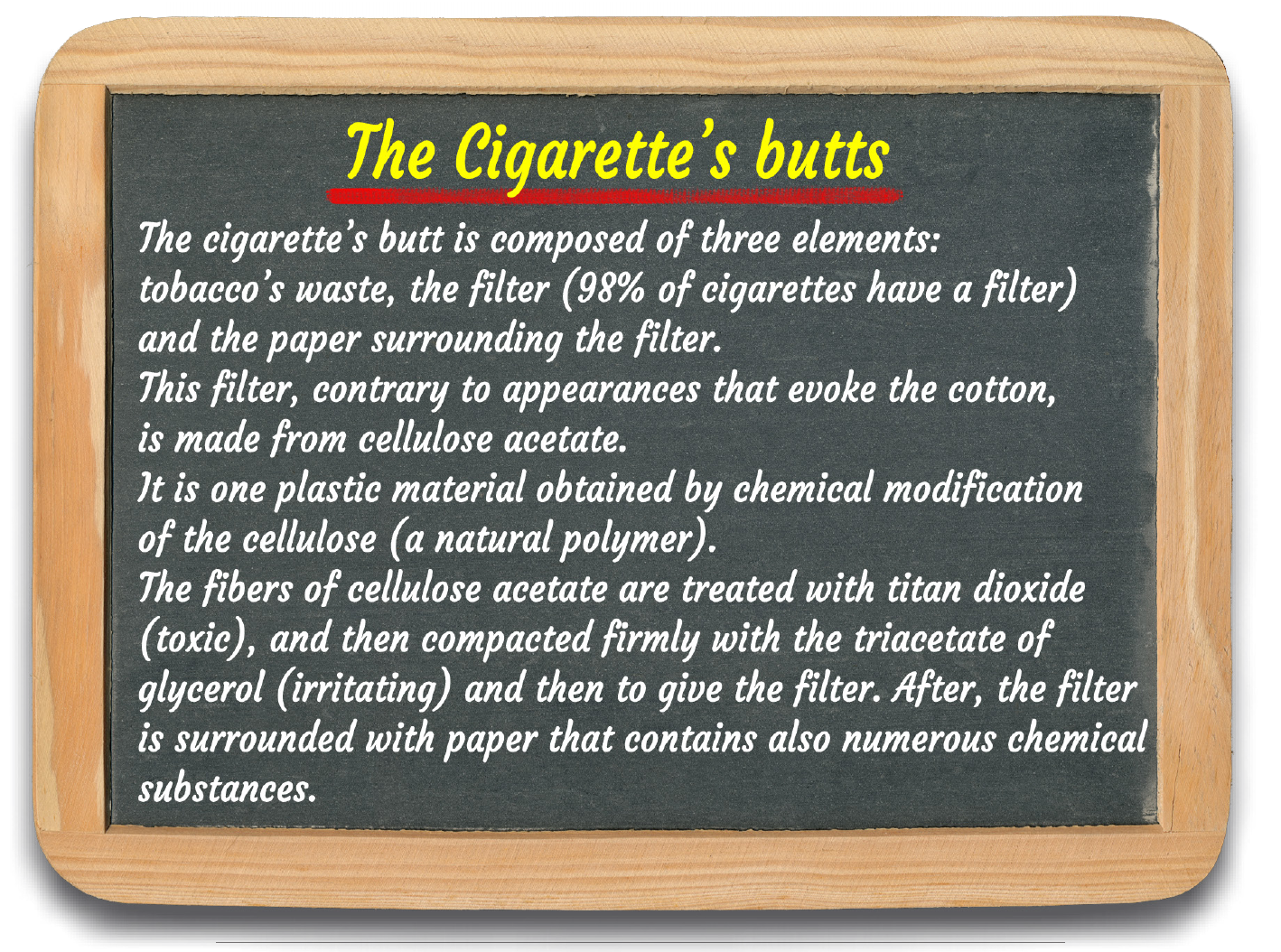
environment, which he is going to contaminate. A cigaree’s lter contains 4000 chemical substances
(nicone, phenol, heavy metals…) as well as some plasc, the cellulose acetate, and it pollutes in itself
500L of water.