πKerBu
eBioROBOT series
Extrait du projet enregistré en 2017©
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 2
Introducon ............................................................................................... 3
Avant de nous introduire dans le projet
πKerBu
, certains chires
éclaireront l’enté du problème. ............................................................... 4
Le Projet
πKerBu
.................................................................................. 8
Pour la pete histoire ................................................................................ 9
Annexe ...................................................................................................... 20

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 3
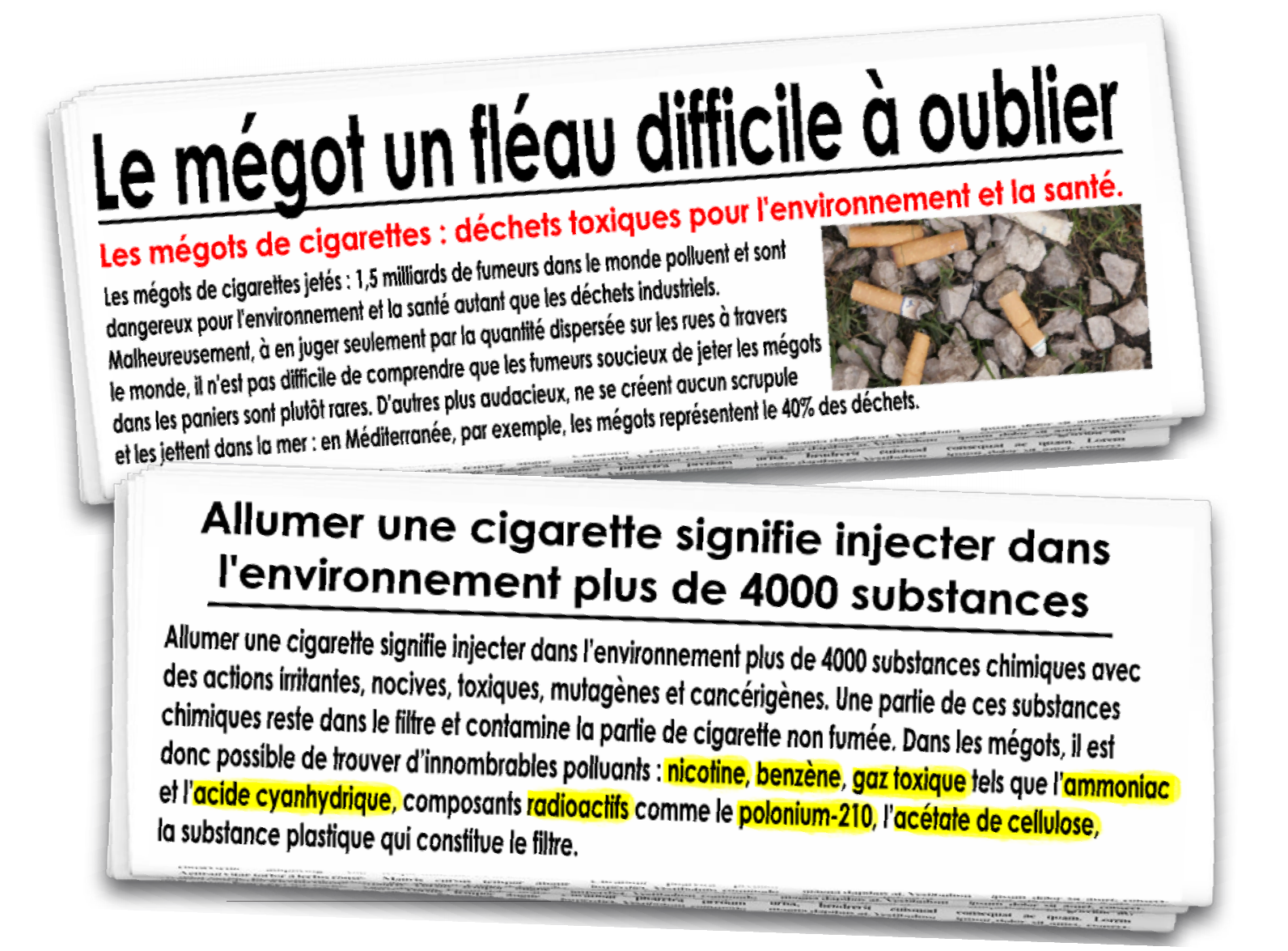
Nous nous adressons à votre Association ou Organisation pour vous
présenter un projet en phase de développement qui devrait attirer votre intérêt.
Ce projet représente, à notre modeste avis, un apport à l ’édification de la
soutenabilité écologique et donc à la sauvegarde de notre écosystème. Loin
de nous l ‘intention de vouloir disserter sur une des causes importantes de
la pollution mais il nous semble néanmoins important d ‘attirer l ‘attention
sur la contamination provoquée par l ‘action néfaste de l ‘abandon de
mégots de cigarettes et d ‘autres objets dans l ‘environnement. Pour pouvoir
appréhender la complexité du problème de l ‘éparpillement et quantifier
l ‘entité du fléau, nous avons récolté quelques articles qui pourront faire
état et nous renseigner sur ce phénomène, si nécessaire. De fait, on ne peut
imaginer une expression plus juste que celle désignant que les plus grands
fléaux sont provoqués souvent par des petites causes.
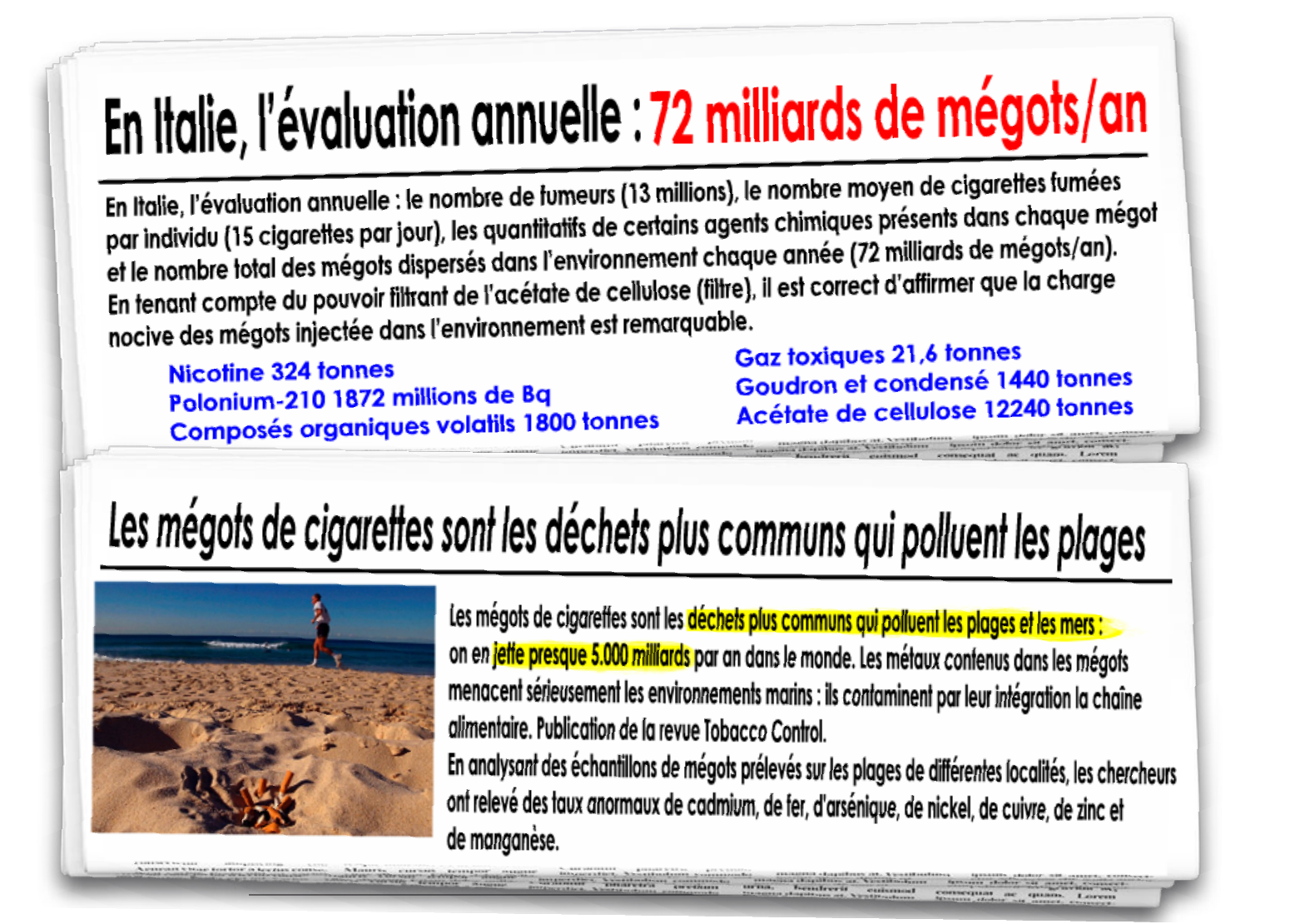
Même si les chiffres ne sont pas toujours concordants, on peut établir
avec certitude que le fléau est catastrophique et à la lumière des données
estimatives et préventives, de vraies politiques, garantissant la maîtrise du
phénomène, et des actions de bonification seront forcément nécessaires.

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 4
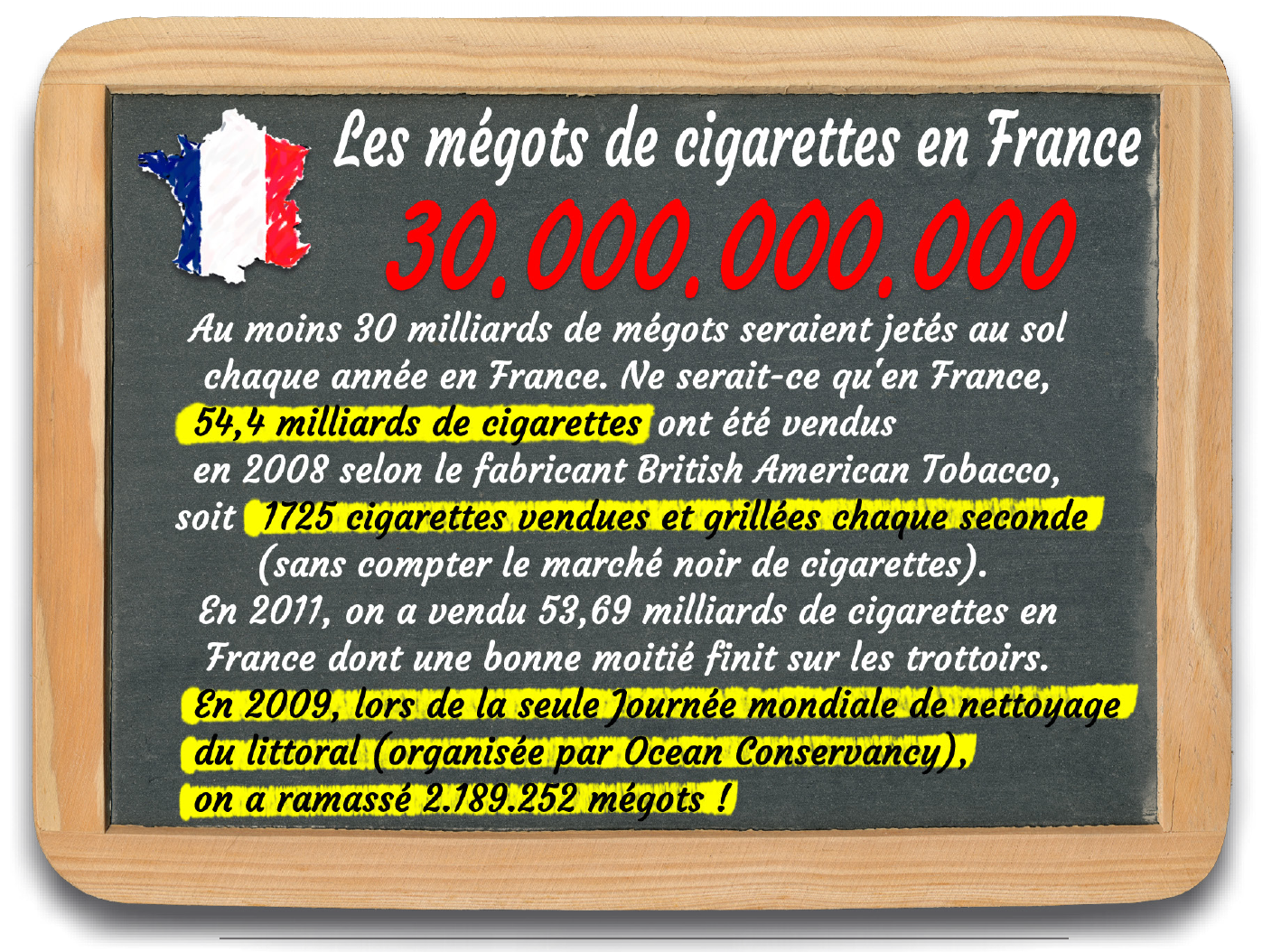
Avant de nous introduire dans
le projet
πKerBu
,
certains chires éclaireront
l’enté du problème.
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 5
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 6

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 7
Si des doutes persistent, les tableaux
de l’annexe peuvent les dénouer.

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 8
Le Projet
πKerBu

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 9
Pour la pete histoire ...
Les soluons jusqu’ici adoptées n’ont pas éradiqué le éau. Sans aucun doute, le système
plus ecace serait celui de l’éducaon ou de la prévenon ou encore de la simple et ecace
éliminaon du tabagisme.
Un jour, dans le jardin public Square du Jardin du Roi à Bruxelles, pendant que j’observais un
opérateur municipal, je fus aré par l’ulisaon d’une pince manuelle qui lui permeait de
récolter, un par un, les mégots parsemés au sol. Evidemment les mégots étaient dispersés
de tous côtés et certains camoués et presque invisibles. En regardant plus aenvement,
je constatai qu’il y en avait des milliers désormais mimésés et recouverts. L’opérateur après
avoir récolté les plus voyants sur son chemin, s’éloigna pour connuer son parcours quodien.
Une goue arrachée à l’océan périt inulement. Si elle reste dans l’océan, elle partage la
gloire de soutenir une oe de navires puissants. Un travail inapplicable qui nécessite une
cadence de travail inhumain, une aenon maniacale et surtout un ordre et une méthode
inacceptables pour aeindre une ecacité esmable.
Toujours assis sur le banc, regardant vers le sol, je me rendis compte de l’ampleur du problème.
Avec l’esprit cartésien d’ingénieur que j’essaie d’appliquer à toutes les quesons que me pose
la vie, je commençai à jeter les bases d’un proto système qui pourrait faciliter la collecte de
ces corps étrangers.
En quelques mois je développai un vrai projet qui peut résoudre le problème de la collecte en
tenant compte des dicultés humaines et objecves.

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 10
Descripon du Projet
πKerBu
:
Le système, pour une récolte automasée des mégots et de tous corps étrangers dénis,
pose des dicultés essenelles qui peuvent être sommairement résumées dans les points
suivants :
• Idencaon des objets à récolter (mégots, cigarees allumées, seringues, aiguilles,
Cotons-Tiges, canees etc.)
• Déambulaon dans des environnements naturels et urbains sur des terrains accidentés où
l’accès est pénalisé par d’innombrables barrières architectoniques (parcs, jardins, routes,
trooirs etc.)
• Autonomie énergéque
• IA intelligence arcielle sachant combiner les informaons insérées à l’origine, d’une
part, et celles acquises empiriquement durant l’expérience des diverses phases d’acvité,
d’autre part.
• Transmission des informaons, récoltées sous diérentes formes, à une télébase de
données.
• Intervenon externe à distance pour permere une récolte manuelle.
Les nécessités et les objecfs préxés pour la créaon d’un robot
capable d’accomplir ces diérentes tâches nous mènent à réaliser
un système de plusieurs automates qui œuvrent en synergie.

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 11
Le Robot se divise en 4 principaux automates qui s’acvent par des agissements coordonnés
dans l’accomplissement de la récolte des mégots. Ceci signie aussi, disposer d’une
communicaon entre les diérents éléments avec une hiérarchie prioritaire, modulable et
modiable selon les condions rencontrées durant l’acvité de récolte.
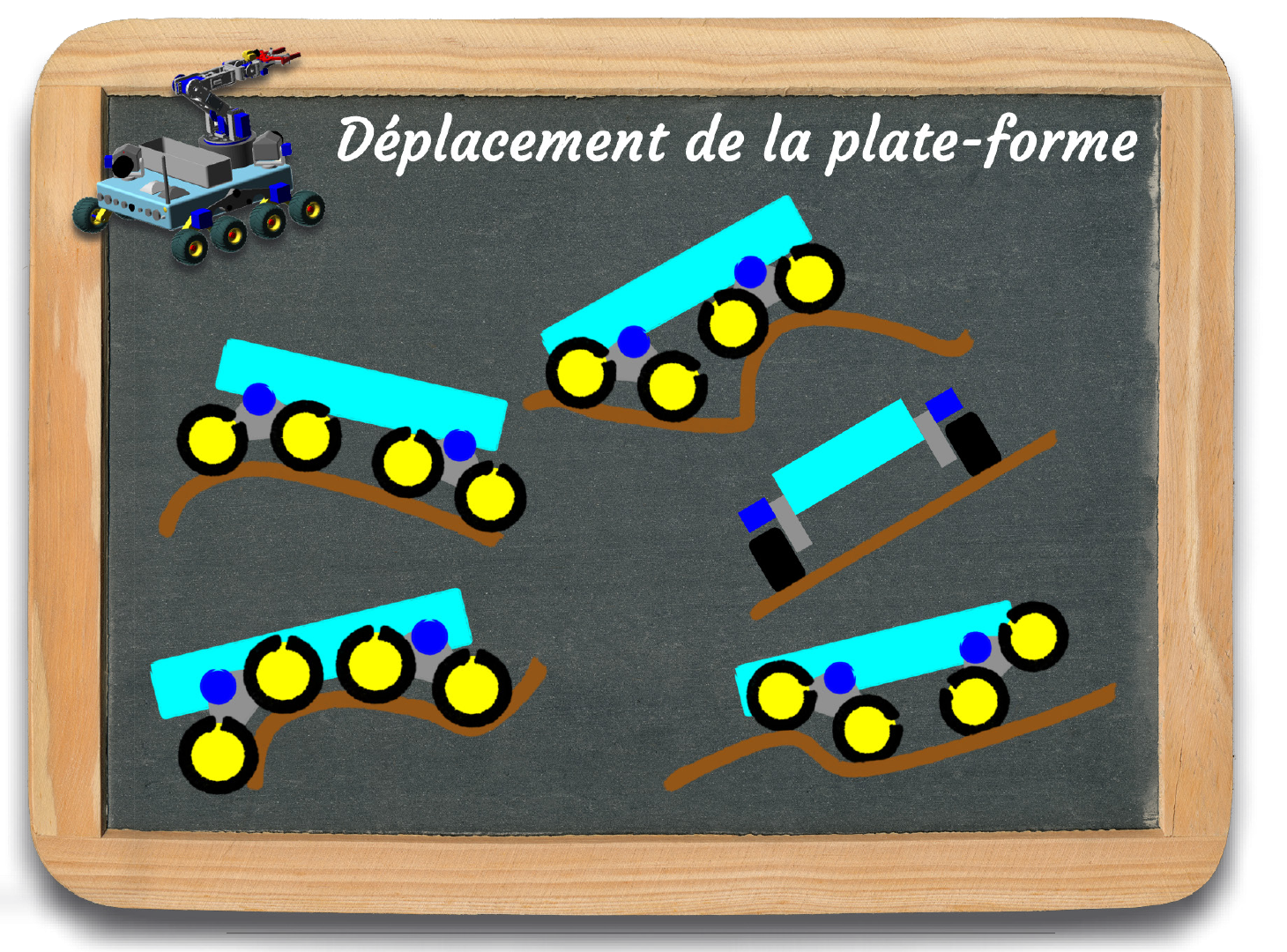
La plate-forme de transfert est constuée de 8 roues motrices en caoutchouc à haute
adhérence avec des raccords spéciaux qui leur permeent de franchir d’importantes barrières
architecturales avec des diérences de hauteur étonnamment considérables.
Le disposif est composé de 4 moteurs indépendants couplés chacun à deux roues (les deux
roues sont motrices). Le contrôle de la plate-forme est précis et permet des mouvements très

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 12
courts pour un posionnement millimétrique. La puissance est également importante car
toutes les autres pièces sont installées sur cee plate-forme. Un ballast composé de baeries
et d’équipements est transporté en toute sécurité depuis cee plate-forme universelle. Elle
requiert un faible couple pour se déplacer à l’arrêt et ore une grande maniabilité. Elle est
équipée de divers senseurs de proximité et de télé-caméras nécessaires au déplacement qui
sont installés à l’intérieur de la plate-forme. Les senseurs permeent de relever des informaons
ules à la navigaon autonome ainsi qu’au relèvement d’informaons de diérentes natures
transmises à l’unité à distance (données sur les condions environnementales). Un GPS avec
une série de gyroscopes et accéléromètres permet d’idener la posion de la plate-forme
et de la transmere à l’unité de contrôle à distance mais aussi de garanr un déplacement
autonome.
Les transmissions vidéo et des données sont eectuées à travers diverses technologies, WIFI,
GPRS, Bluetooth et autres.
Le comparment interne de la plate-forme conent diérentes unités électroniques et
héberge les baeries nécessaires à fournir l’énergie susante pour les acvités motrices de
la plate-forme, du bras et des caméras d’idencaon. Les diérentes caméras, hébergées
à l’intérieur de la plate-forme, ont deux foncons principales : relèvement du sol et des
éventuels obstacles mobiles et staques et surveillance depuis l’unité à distance.
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 13

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 14
Le bras se compose d’une structure motorisée simple avec 6 moteurs capables de donner
une exibilité maximale. Arculé sur 6 axes, il est équipé d’une pince à mâchoire mobile
capable de soulever des poids moyens.
La base, sur laquelle repose le bras et qui permet sa rotaon autour de son propre axe, est
xée sur la pare antérieure de la plate-forme et est logée à l’intérieur du comparment de
celle-ci. La xaon à l’intérieur de la plate-forme permet de créer une structure unique et
stable. La plate-forme et le bras constuent une unique structure en donnant une stabilité et
une solidité au robot malgré ses petes dimensions.
L’épaule du bras roboque permet de soulever et d’abaisser la pince ainsi que son extension.
L’avant-bras permet d’eectuer les mêmes opéraons du bras et de l’épaule. L’associaon
des mouvements réalisée par ces diérents éléments garant d’une part une réparon des
eorts et un accroissement de la force appliquée et d’autre part une plus grande liberté de
mouvements.
La pince peut s’ouvrir et se fermer, tourner sur son axe ou se soulever et s’abaisser en simulant
les mouvements du poignet. La pince a été conçue de manière à pouvoir ramasser des objets
de diérents types et, si nécessaire, de s’équiper d’ouls amovibles et indépendants pouvant
être ulisés en foncon des besoins rencontrés. Tout est commandé par une pete carte
électronique avec un microcontrôleur et diérentes circuiteries périphériques.
Descripon des opéraons
Le robot anthropomorphe est aconné par 6 servo moteurs à courant connu qui permeent
de déplacer les diérents éléments. Il possède 5 degrés de liberté ainsi que les mouvements

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 15
d’ouverture et de fermeture de la pince. Le premier degré de liberté permet le mouvement
de rotaon autour de l’axe vercal, le deuxième et le troisième le mouvement des deux bras
arculés, le quatrième le mouvement de la pince et le cinquième la rotaon de la pince
autour de son propre axe. Avec cet agencement, il sera possible d’uliser les mêmes robots
pour un grand nombre d’ applicaons diérentes en foncon de la programmaon établie.
Les servo moteurs du robot sont de deux types :
• 3 moteurs de puissance modeste sont employés pour la rotaon et pour
l’ouverture/fermeture de la pince
• 3 moteurs de dimensions et puissance supérieures, qui permeent au bras,
par l’intermédiaire de simples engrenages, de manipuler des charges de l’ordre
d’environ 2 à 3kg.
Tout est commandé par une pete carte électronique avec un microcontrôleur et diérentes
circuiteries périphériques.
Le bras est équipé d’une caméra de modeste dimension avec des capteurs de divers types
capables d’établir les distances, la morphologie de l’espace environnant, l’objet à récolter,
ses dimensions, sa posion, sa couleur et d’autres informaons. Cee caméra installée sur le
bras suit tous les mouvements de ce dernier. Toutes les informaons peuvent, selon les cas et
nécessités, être transmises à l’unité de surveillance à distance. Le robot avec sa plate-forme
mobile est interacf, et donc, capable de relever la présence et la distance des objets dans un
rayon d’acon déterminé et d’eectuer la saisie et le posionnement.
Les caméras d’idencaon. Les unités décrites jusqu’à présent sont nécessaires au but
préxé mais ne représentent pas le cœur et le moteur du projet. Sans l’unité que nous

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 16

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 17
nous apprêtons à décrire, il ne serait pas possible de rejoindre les objecfs préxés. L’unité
d’idencaon ou encore de reconnaissance est la clé de voûte de tout le système.
Cee unité est constuée de deux caméras avec des caractérisques opques parculières
et d’une série de capteurs qui aident à l’idencaon et à la déterminaon des informaons
nécessaires au bras pour la récolte de l’objet. Ces deux caméras constuées d’une opque
parculièrement complexe et d’une IA (Intelligence Arcielle) consentent l’idencaon
de l’objet qui se présente avec des morphologies, dimensions et couleurs diérentes. La
diculté qui se manifeste n’est pas représentée par l’idencaon d’un objet mais par sa
dissimulaon. Ceci implique une IA adéquate qui puisse prévoir les caractérisques de l’objet
à rechercher. Prévoir est une synthèse d’informaons de base et acquises par l’expérience,
élaborées par un algorithme capable de devancer les traits du futur objet, même si jamais
discerné auparavant. Les deux caméras sont xées sur des bases mobiles qui permeent un
degré de liberté sur deux axes. Celles-ci assistées par diérentes technologies balayent de
façon connue le sol à la recherche des objets.
Il faut souligner l’acon de l’IA qui réussit à élaborer rapidement et ponctuellement toutes les
informaons pour idener l’objet. Comme expliqué précédemment l’acon d’idencaon
est soutenue par la faculté d’apprenssage. L’ulisaon instantanée des données enregistrées,
sans la nécessité d’aendre une élaboraon à posteriori auprès du serveur à distance, rend
le IA performant et ecace durant sa quête. Ces mêmes informaons élaborées peuvent
être ajoutées sur d’autres unités comme know-how de base en complétant ainsi l’expérience
de divers robots et en les rendant plus habiles. Cee foncon a été désignée avec la parole
« smartrisaon ». La smartrisaon peut être transmise à d’autres unités an d’accroître leur
ecacité.
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 18
L’étude et l’analyse de l’IA ont été au centre de nos recherches et, suite à d’innombrables
expérimentaons, nous sommes parvenus à élaborer un soware capable de reconnaître des
pets objets comme les mégots de cigarees.
Evidemment l’évoluon ne s’arrête pas et donc l’objecf est de pouvoir créer une oe
de robots aptes à interagir entre eux et à bonier des zones déterminées ecacement et
méthodiquement.
Les possibilités et les bénéces oerts par ces acons sur grande échelle sont, sans aucun
doute, une réponse valable et ecace à un éau incontrôlé dont l’impact et les répercussions
ne sont pas encore bien évalués comme le démontrent les chires des chercheurs.
En outre, il ne faut pas oublier que la même plate-forme du robot est capable de réaliser
simultanément d’autres opéraons de détecon, comme par exemple une collecte
d’informaons environnementales méculeuses et précises.
Ce robot démontre plus que d’autres la vraie nature et la nécessité de ce type d’appareil.
ORDRE, MÉTHODE ET CONSTANCE = EFFICACITÉ

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 19

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 20
Annexe
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 21

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 22

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 23

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 24
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 25
20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 26

20-22 Wenlock Road London N1 7GU - contact@b2bcom.info - +44 (0)20 719 31571
Pag.: 27

Des expériences ont été eectuées avec des mégots où il restait 1 à 2 cm de tabac, puis des mégots sans tabac
restant et enn, des ltres non ulisés. Ils ont été trempés séparément dans une eau de diluon (eau minérale
diluée pour les poissons d’eau douce et eau de mer pour les poissons de mer) pendant 24h. Puis, des diluons
ont été eectuées et on a laissé les poissons y vivre ou plutôt survivre pendant 96h.
L’étude recherchait la concentraon en mégots qui procure 50% de mortalité des poissons, que l’on nomme
LC50 (lethal concentraon 50.)
Les résultats ont montré que le LC50 pour les mégots contenant du tabac était aeint à 1,1 mégots/L pour
les deux espèces de poissons.
Le LC50 pour les mégots seuls a été aeint à 4,1 mégots/L pour le poisson d’eau de mer et à 5,5 mégots/L
pour le poisson d’eau douce.
Le LC50 pour les ltres propres a été aeint à 5,1 mégots/L pour le poisson d’eau de mer et à 13,5 mégots/L
pour le poisson d’eau douce. Ce qui est assez surprenant car le ltre seul s’avère nalement assez toxique.
On remarque des diérences assez agrantes pour les mégots seuls entre les espèces marines et d’eau
douce. Le poisson d’eau de mer (Atherinops anis) s’avère beaucoup plus sensible à la toxicité des mégots.
Selon l’étude, cela pourrait être dû à la dureté de l’eau de mer. Il est alors possible que toute nicone non
disponible devienne biodisponible plus rapidement dans l’eau de mer, délivrant donc plus rapidement une
concentraon plus forte aux poissons.
D’autre part, concernant les mégots seuls, il est possible que le fait de fumer crée de nouveaux produits

chimiques plus toxiques et change la solubilité des composés dans le mégot les rendant davantage
biodisponibles.
Malgré la preuve de plus en plus forte de la toxicité des mégots qui a maintenant été faite sur deux espèces de
poissons, il reste dicile d’évaluer l’impact réel des mégots sur le milieu aquaque (c’est-à-dire à une échelle
plus large). Il faut donc encore étendre la recherche sur les composés qui entrent en jeu, le potenel de
bioaccumulaon correspondant à la capacité des organismes à absorber et concentrer certaines substances
chimiques.
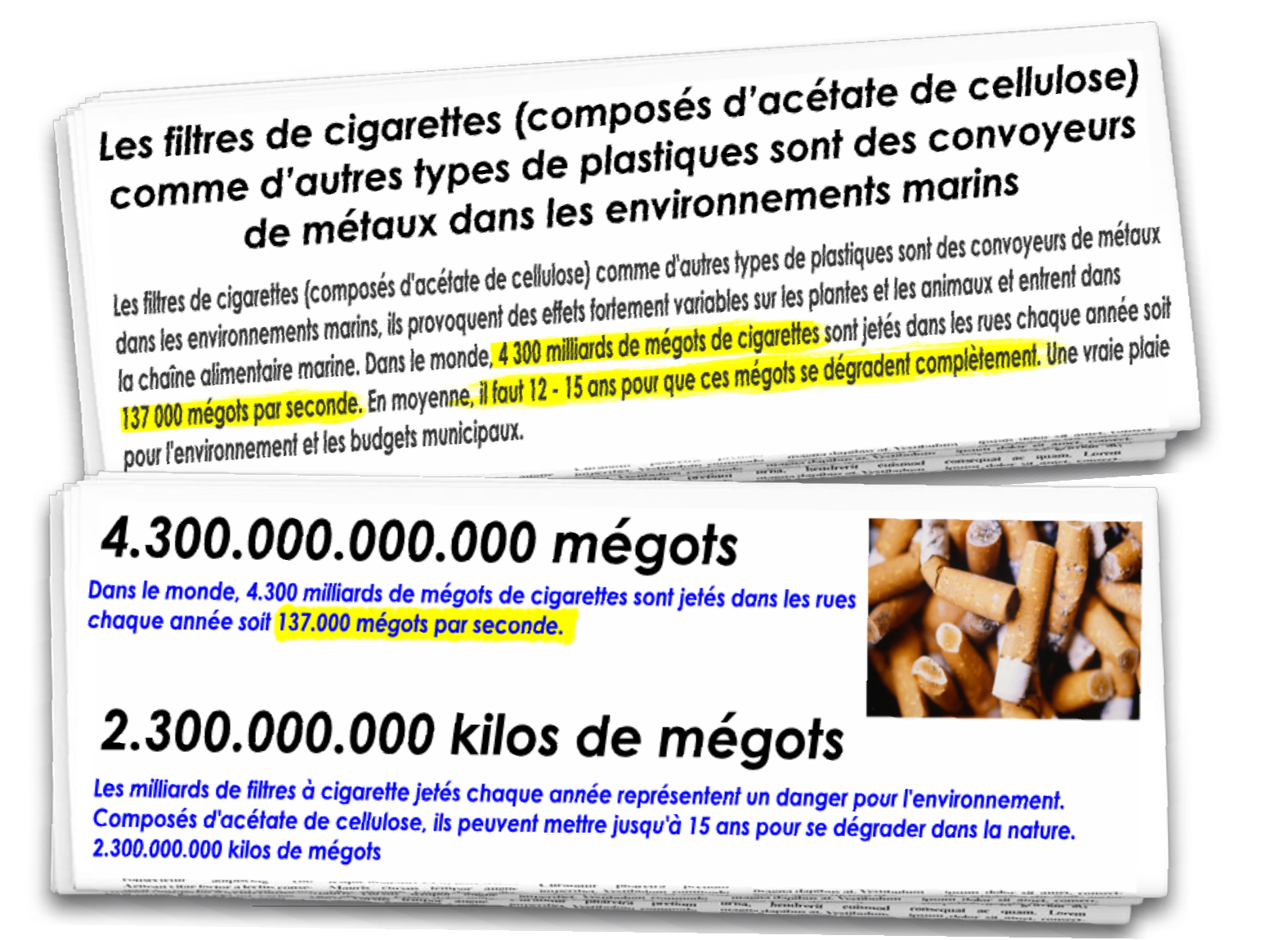
Comme d’autres gestes de notre quodien qui nuisent à l’environnement, jeter son mégot au sol a des
conséquences bien plus importantes que ce que l’on imagine. Le mégot est en eet le premier déchet
marin. Emporté par le vent et la pluie, il se retrouve rapidement dans les réseaux d’assainissement puis
dans le milieu aquaque qu’il va contaminer. Un ltre à cigaree conent 4000 substances chimiques
(nicone, phénol, métaux lourds…) ainsi que du plasque, l’acétate de cellulose, et il pollue à lui seul 500L
d’eau.